組み立てマニュアル
以下の安全性に関する指示を守らないと、火災、感電、その他の負傷、またはRapiroやその他の部品の破損を招く恐れがあります。組み立てを行う前に、以下の安全性に関する情報をすべてお読みください。
- 水濡れや火気にご注意ください。
- 通電する際は(特にリモート操作する場合)、人の目の届く場所で行ってください。サーボモーターのオーバーヒートにより、火災が起こる恐れがあります。
- 部品が濡れている状態で通電しないでください。感電や火傷をする恐れがあります。
- このキットには、小さな部品がたくさん入っています。小さなお子様がいらっしゃる場合、誤飲しないように注意しながら組み立ててください。
- 直射日光の当たる場所で長期間保管しないでください。サーボモーターやその他部品が劣化し、破損する恐れがあります。
- 通電している状態で、無理に手足を動かすと、サーボモーターが破損する恐れがあります。
- サーボモーターの初期角度の調整を行わずに通電した場合、サーボモーターが劣化し、破損する恐れがあります。
- 指定の規格のACアダプタを使用しない場合、正常に動作しない可能性があります。
- 指定の電池を使用しない場合、または満充電されていない場合、正常に動作しない可能性があります。
- 初期不良が疑われる場合には、defect@rapiro.com までご連絡ください。
製品保証について
製造上の問題に起因する、不具合、動作不良、内容物の不足については、ご購入から3ヶ月に限り、当社の負担で交換部品を提供します。defect@rapiro.com までご連絡ください。本製品は組み立てキットですので、組み立てまたは使用上の間違いによる破損については、当社は補償しません。特に、サーボモーターはその性質上、使用の頻度に応じて劣化する事があります。キットを構成する部品は、補修部品として個別にご購入可能になる予定です。
WEBショップ
リファレンス
プログラムや組み立て方に関する、個別の技術サポートは行いません。これらに関するご意見、ご質問はフォーラムに投稿してください。
Forum
電源について
電池を使用する場合は、必ず以下のいずれかをご使用ください。
- Panasonic Eneloop
- Panasonic Eneloop Pro
- Energizer Recharge
電池の充電が不十分な場合、サーボモーターが正常に動作しません。必ず満充電した状態でご使用ください。 アルカリ乾電池、マンガン電池はご使用いただけません。特にご注意ください。
ACアダプターを使用する場合必ず以下のいずれかをご使用ください。
- 定格:電圧DC6V~12V、電流4A以上
- プラグの形状:外形5.5mm、内径2.1mm、センタープラス
品質や特性により記載された定格を満たさないものもあります。ご注意ください。
動作確認済みのACアダプター
組み立てに必要なもの
- このキット
- ドライバー(#0と#1)
- 電池またはACアダプタ等の電源
- パソコン
- パソコンのソフトウエア
組み立て
| 1 |

|
Rapiroの箱です。 |
|---|---|---|
| 2 |

|
フタを開けるとパーツが入っています。 |
| 3 |

|
パーツは2層になっています。 |
| 4 |

|
パーツを取り出しましょう。 |
| 5 |

|
見やすいようにパーツを並べます。 パーツリスト |
| 6 |

|
まずは12個のサーボモーターにシールを貼っていきます。 |
| 7 |

|
大きなサーボモーターには青いシールを貼ります。 |
| 8 |

|
|
| 9 |

|
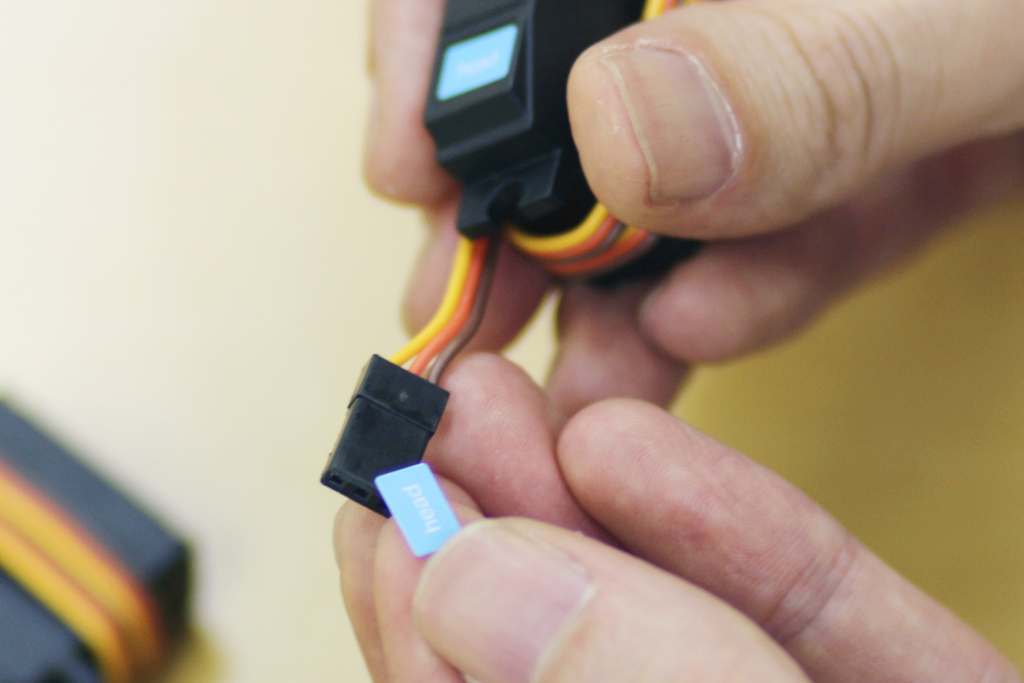
サーボモーターとそのコネクターに同じシールを貼って下さい。 |
| 10 |
|
|
| 11 |
|
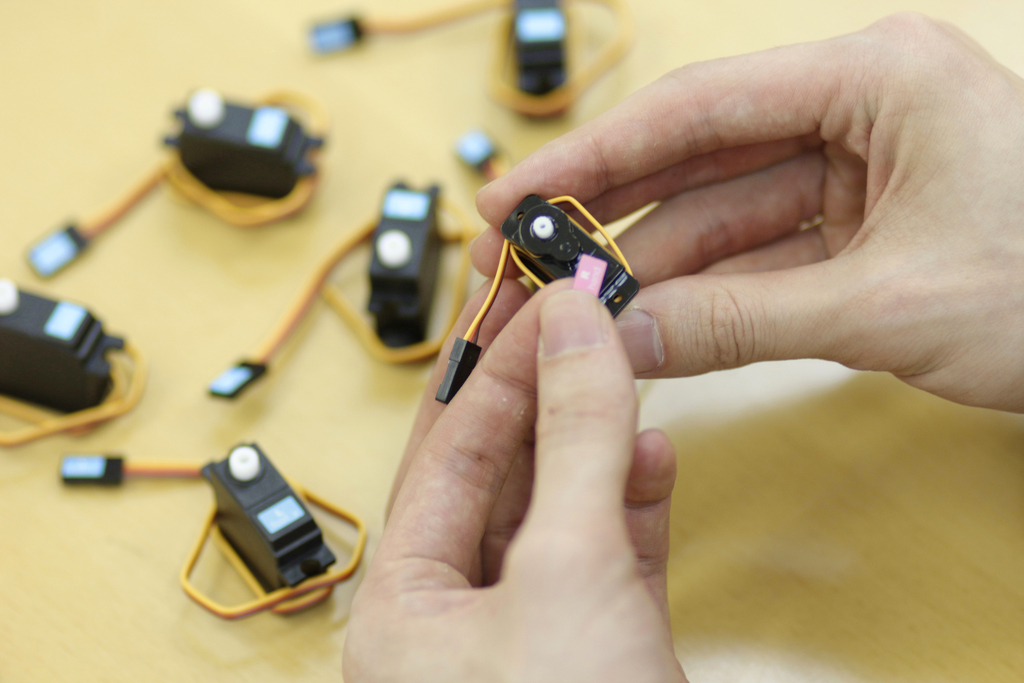
小さいサーボモーターにはピンクのシールを貼っていきます。 |
| 12 |

|
|
| 13 |

|
小さいサーボモーターもそのコネクターに同じシールを貼って下さい。 |
| 14 |

|
|
| 15 |

|
サーボモーターにシールを貼っておくと後でモータに基板を接続するときの目印になります。 |
| 16 |

|
次にもう一つの袋を開いて中身を確認しましょう |
| 17 |
|
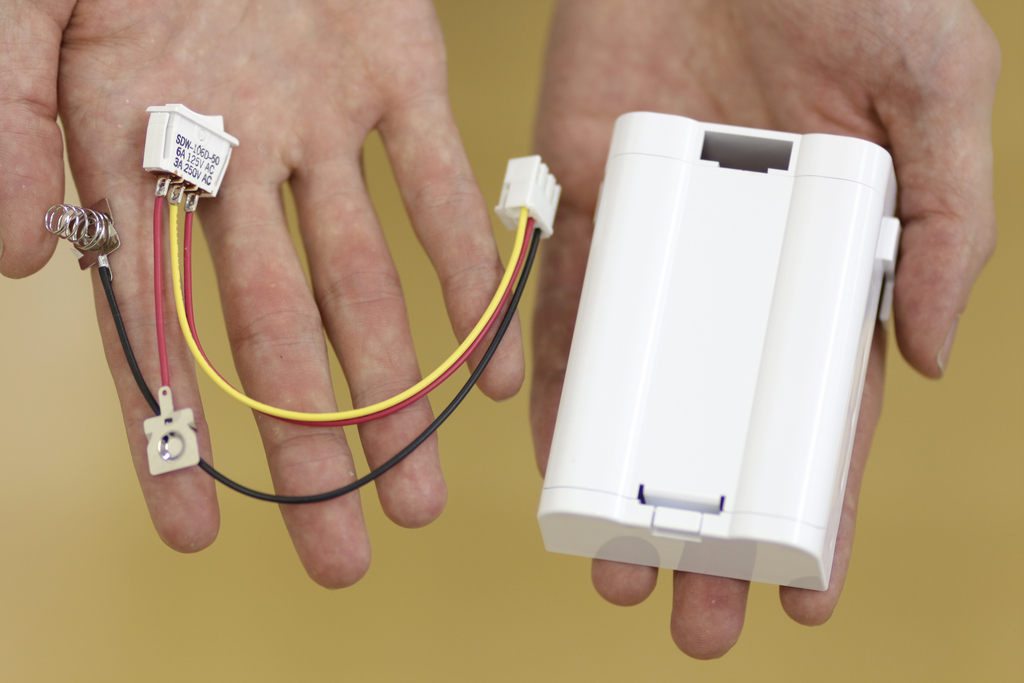
つぎに電池ボックスを組み立てていきます。 |
| 18 |

|
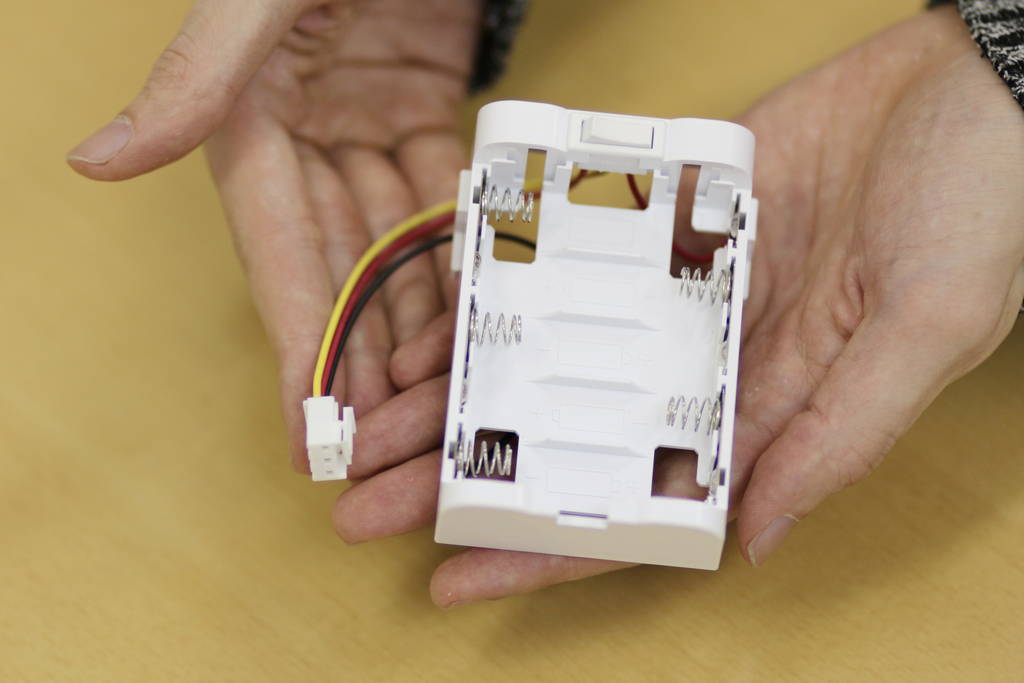
電池ボックスのフタを開いてスイッチケーブルを取り付けます。まず、写真の位置の穴にコネクターを通していきます。 |
| 19 |

|
写真のようにスイッチケーブルのコネクターを表側から裏側に向かって通します。 |
| 20 |

|
コネクターと同様に電極も通します。 |
| 21 |

|
このようにコネクターと2つの電極を裏側へ通して下さい。 |
| 22 |

|
写真のようにスイッチの印字面を上にしてスイッチを電池ボックスにはめ込みます。 |
| 23 |

|
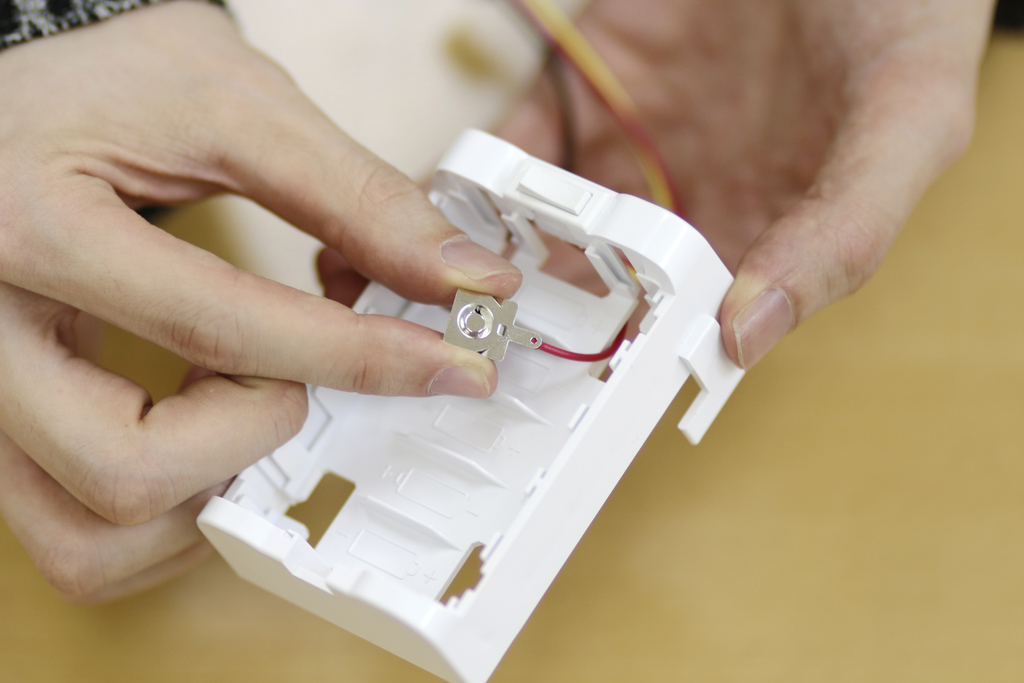
次に電極を取り付けていきます。 |
| 24 |
|
先ほど裏側へ通した電極を、写真の位置の穴から再び表側へ通して下さい。 |
| 25 |

|
電池ボックスのスリットに電極を差し込みます。 |
| 26 |

|
電極を置くまで押し込んで下さい。 |
| 27 |

|
つぎにもう一方の電極です。 |
| 28 |

|
もう一方の電極も写真の位置の穴から再び表側へ通します。 |
| 29 |

|
電池ボックスのスリットに電極を差し込みます。 |
| 30 |

|
こちらも奥まで押し込んで下さい。 |
| 31 |
|
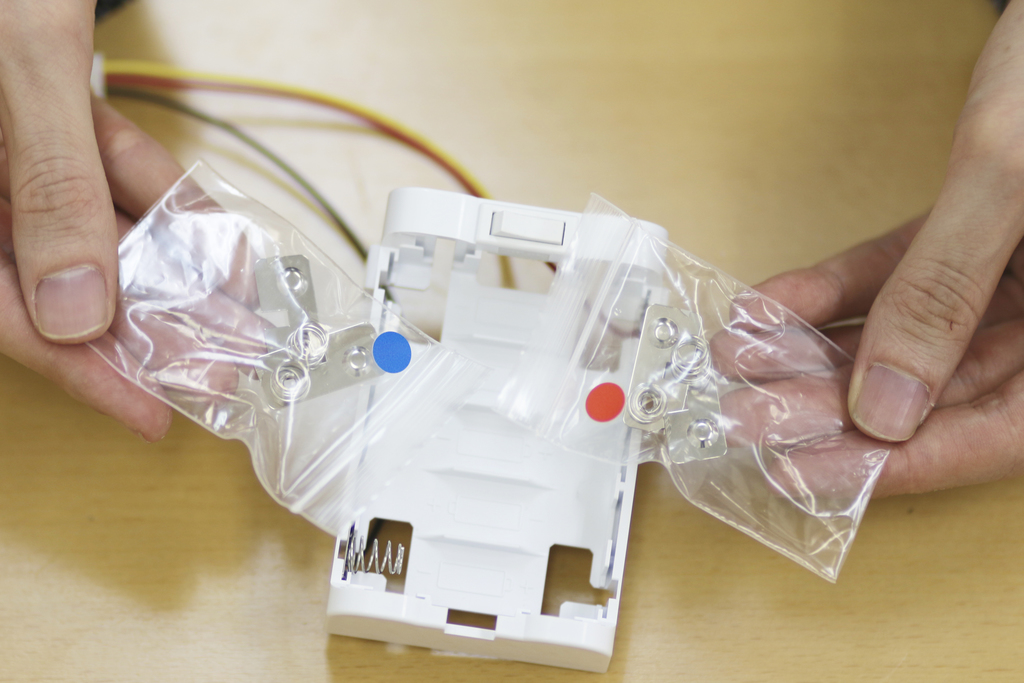
つぎに赤と青の印の付いた袋に入った電極を取り付けていきます。 |
| 32 |

|
青い印の袋に入っている電極は向かって左側に差し込みます。 |
| 33 |

|
青い印の袋に入っている電極は向かって左側に差し込みます。 |
| 34 |

|
電極を奥まで押し込みます。 |
| 35 |

|
電極を奥まで押し込みます。 |
| 36 |

|
赤い印の袋に入っている電極は向かって右側に差し込みます。 |
| 37 |

|
赤い印の袋に入っている電極は向かって右側に差し込みます。 |
| 38 |

|
電極を奥まで押し込みます。 |
| 39 |
|
このように電極のプラス側とマイナス側が交互に並ぶようになります。 |
| 40 |

|
裏側の配線が飛び出ないように指で少し押し込んでおきましょう。 |
| 41 |

|
電池ボックスの裏側に沿うように配線に指でクセをつけておきましょう。 |
| 42 |

|
電池は単三型(AA)のニッケル水素(Ni-MH)充電池5本を使用してください。 必ずこちらのいずれかを満充電でご使用ください。 |
| 43 |

|
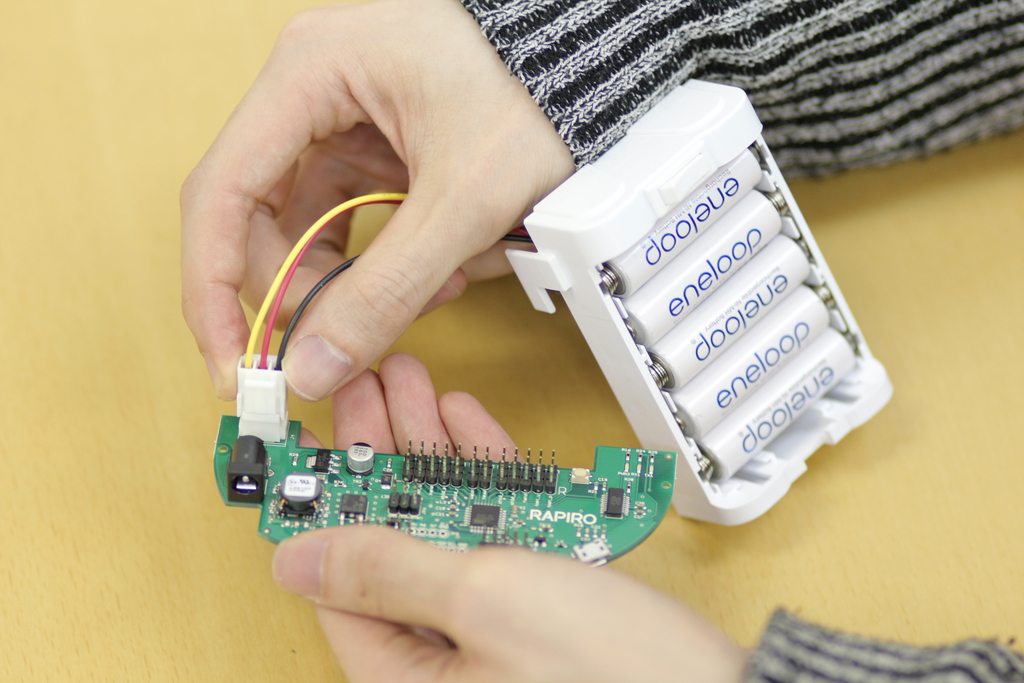
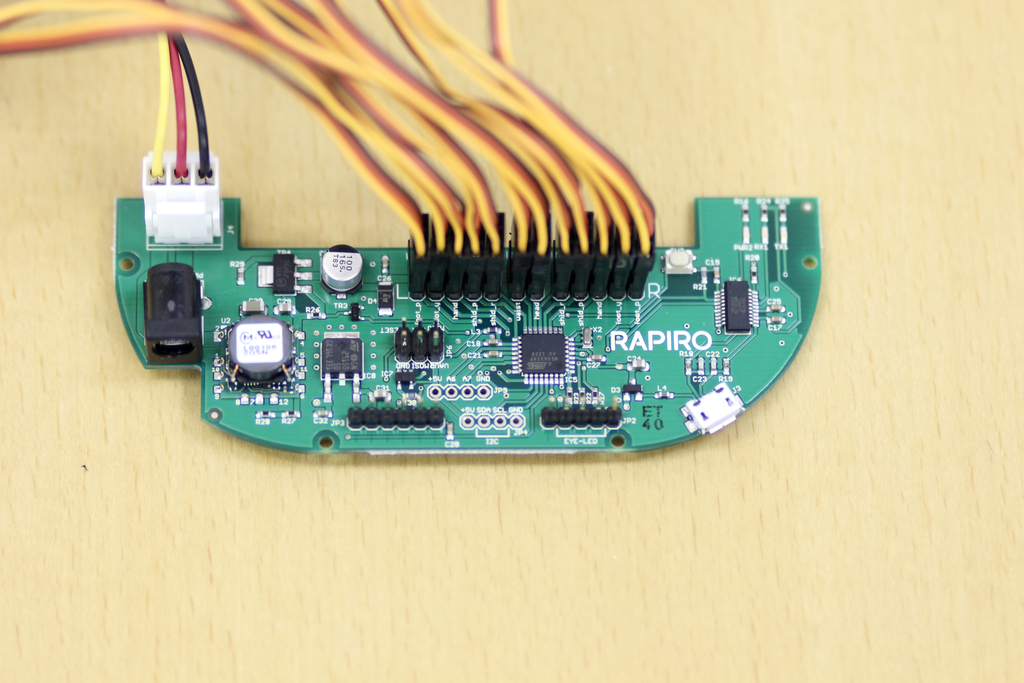
つぎにRapiroメイン基板を取り出します。 |
| 44 |
|
電池ボックスのコネクターを写真の位置に差し込みます。 |
| 45 |

|
電池ボックスのフタを閉めてみましょう。 |
| 46 |

|
電池ボックスにシールを貼ります。Battery Boxと書いてあるところの細長いシールです。 |
| 47 |

|
写真の位置に貼って下さい。 |
| 48 |

|
このようになります。 |
| 49 |
|
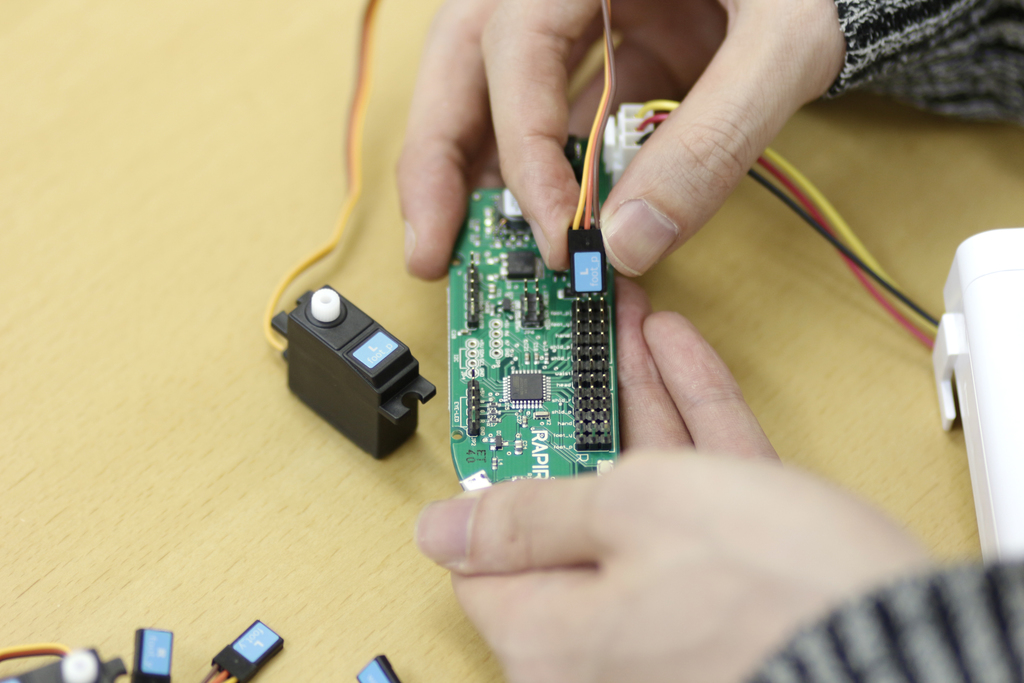
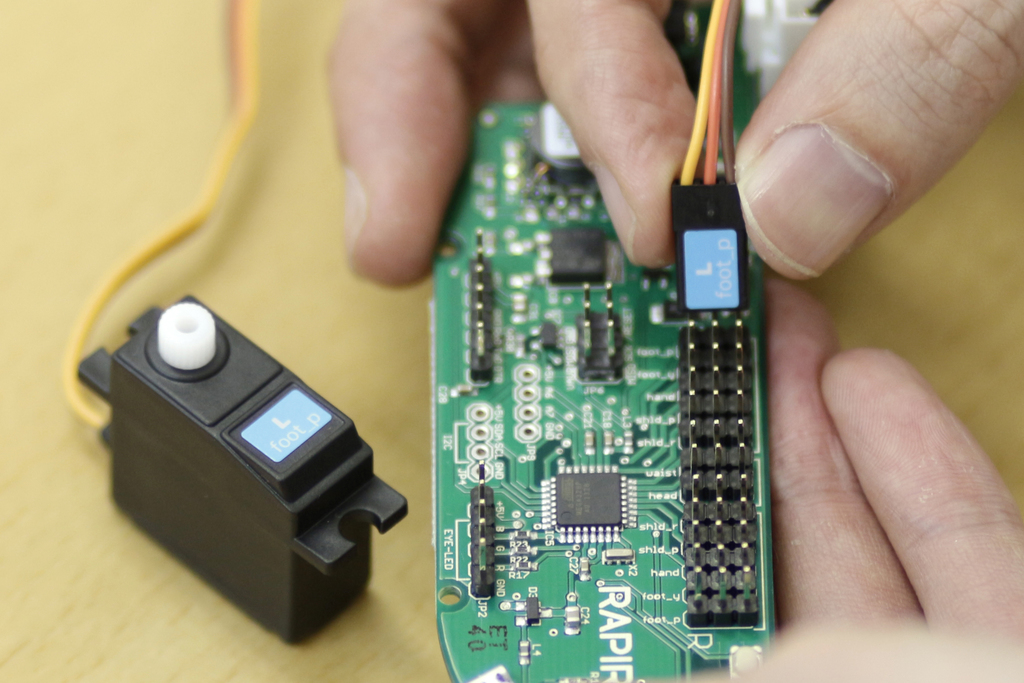
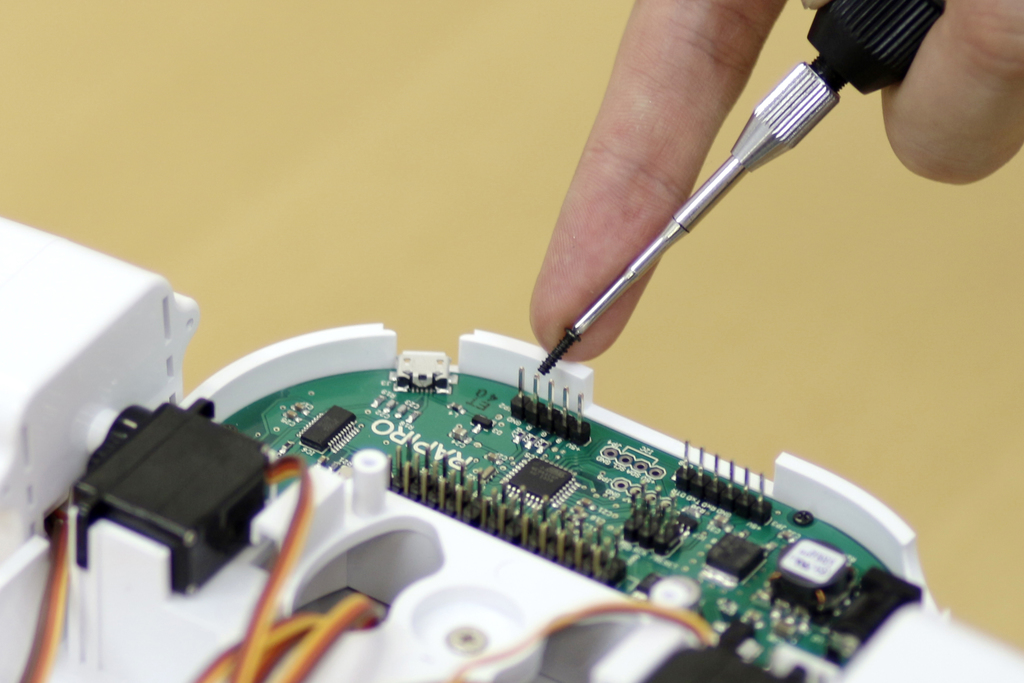
基板上に書かれた端子名とコネクターに貼ったシールの文字が一致するようにサーボモーターのコネクターを基板に挿し込んでいきます。 |
| 50 |
|
|
| 51 |
|
端子名とコネクターの対応を確認しながら、すべてのコネクターを基板上の端子に挿し込んでいきます。(RとLをよく確認して挿し込んでください) |
| 52 |

|
|
| 53 |
|
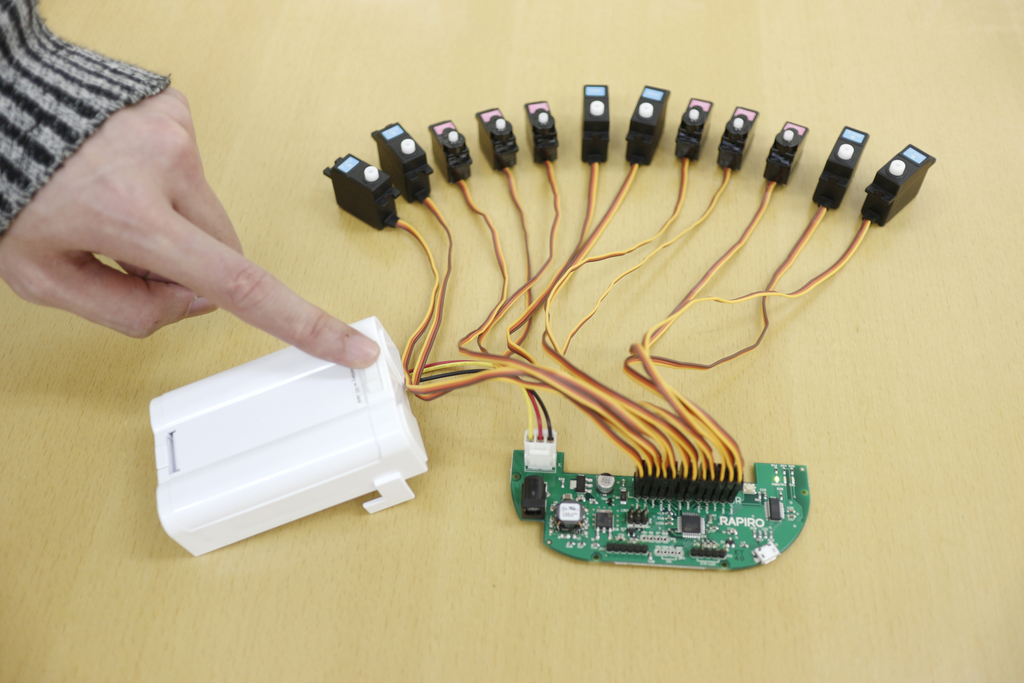
電池ボックスのスイッチをONにしてください。 12個のサーボモーターの軸が一斉に初期位置に向かって回転し、停止します。これでサーボモーターの角度を初期値にあわせることができました。 重要 満充電されたニッケル・水素充電池を5つお使いください。もしそうでない場合、サーボが正しく動作しません。 重要 このステップでサーボモーターの軸を初期位置にした後は、組み立て中に軸を回転させないようにしてください。特にサーボモーター周辺のパーツを取り付ける際に、サーボの軸が回転してしまわないように注意してください。組み立て後にRapiroに電源を供給したときに、Rapiroが変な姿勢をとる原因として、サーボの軸を正しくない状態で組上げてしまうことが考えられます。 |
| 54 |

|
12個のサーボモーターの角度を初期値にすることができたら、いよいよ本体の組み立てです。電池ボックスのスイッチをOFFにして12個のサーボモーターは一旦すべて基板から外します。 |
| 55 |

|
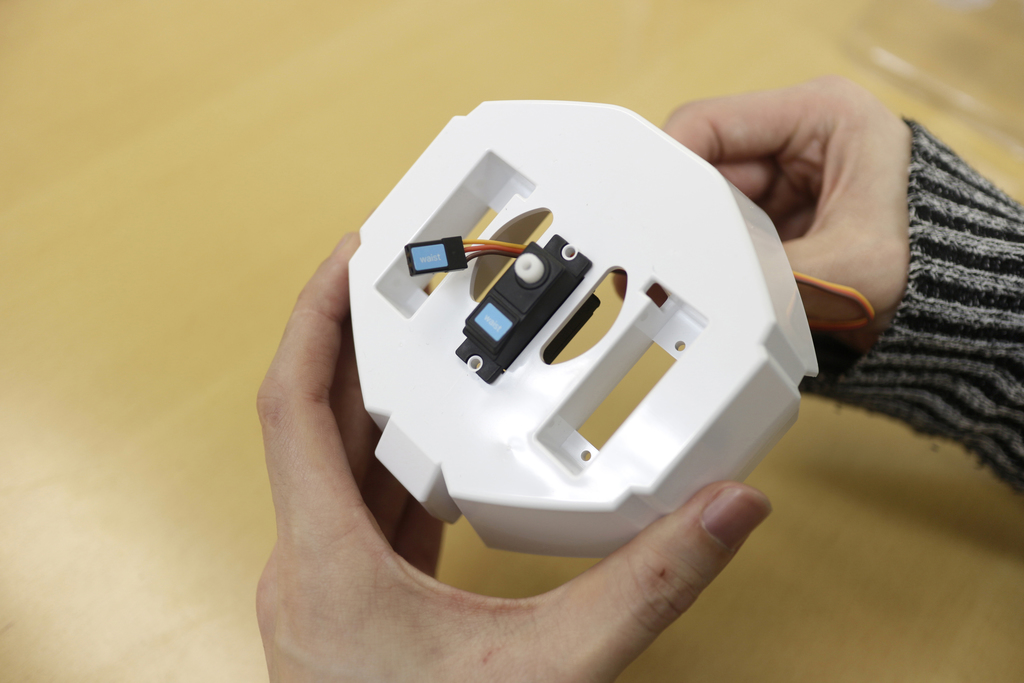
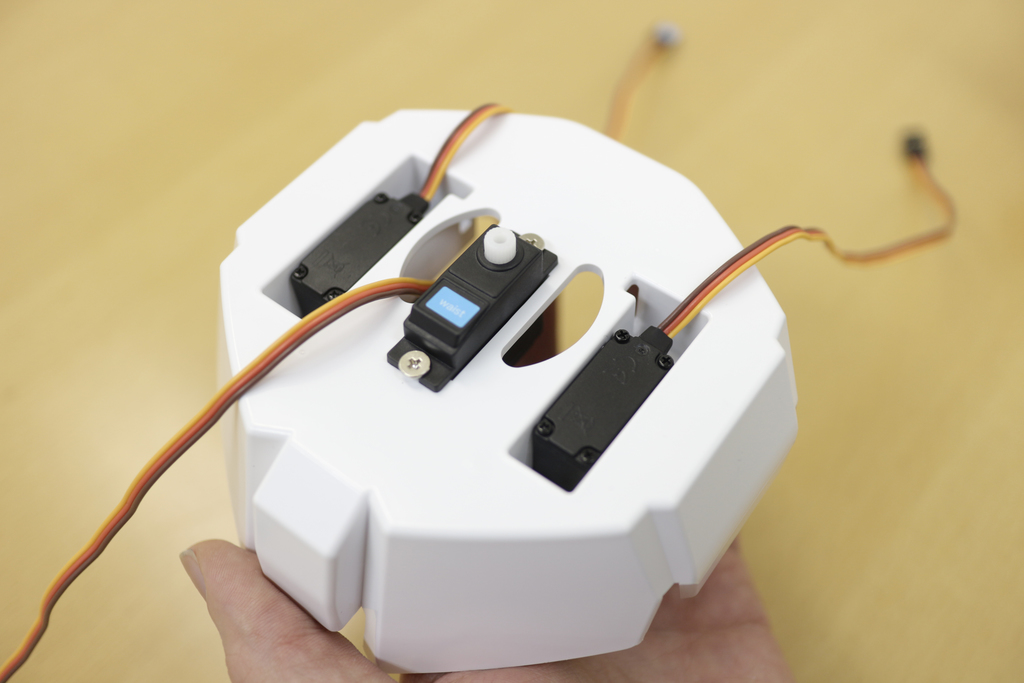
写真のように腰パーツの真ん中の四角い穴に「waist」のサーボモータを挿し込みます。ケーブルから先に通してください。 |
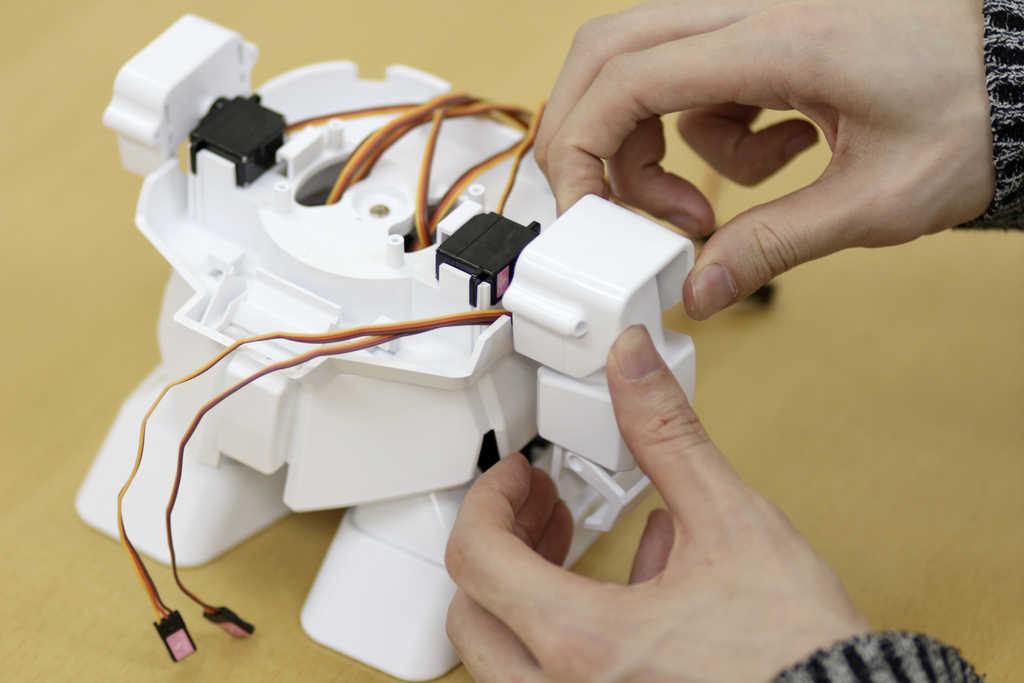
| 56 |
|
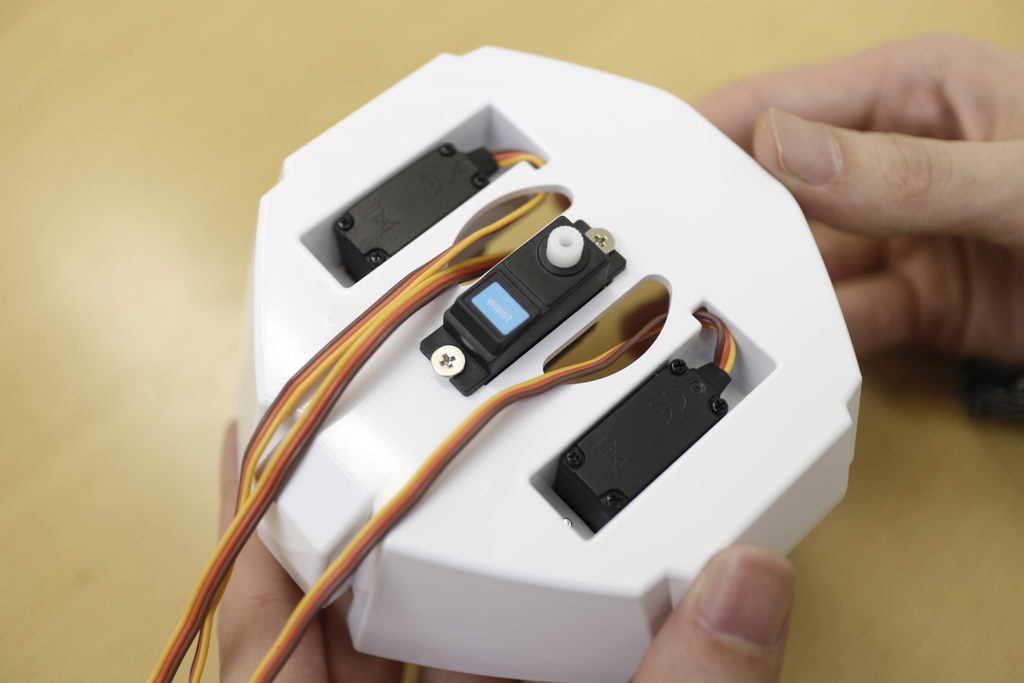
サーボモーターをはめ込み、ケーブルを横の穴から通します。サーボモーターの向きを写真と同じになるように確認して下さい。 |
| 57 |

|
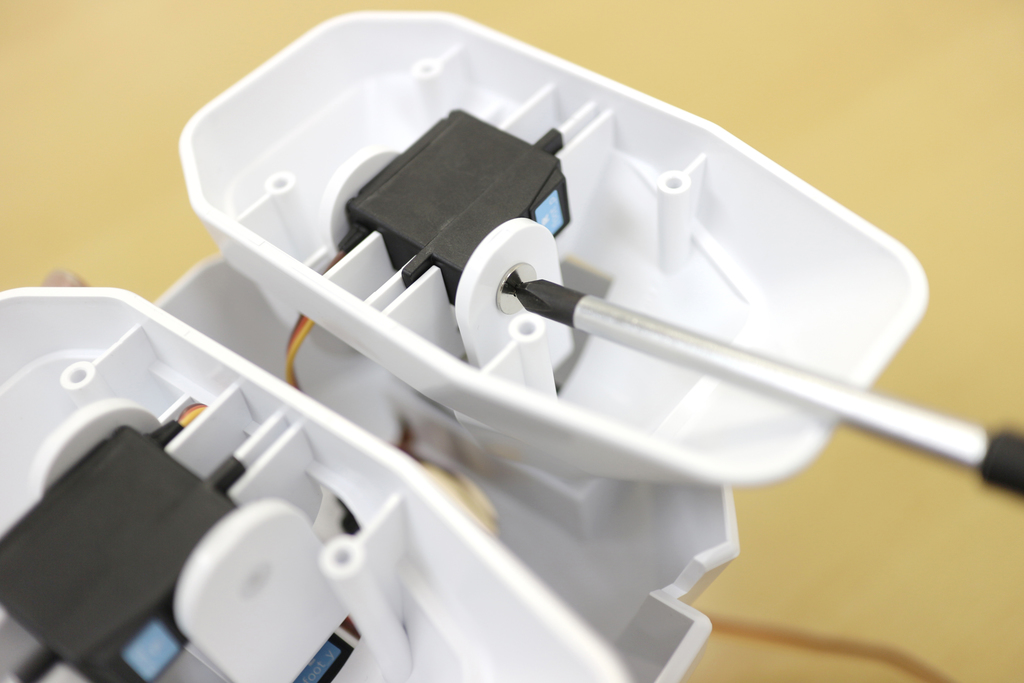
腰のサーボモーターの固定には銀色の太めのネジ(タッピング3mm)を使います。 |
| 58 |

|
銀色の太めのネジ(タッピング3mm) |
| 59 |

|
ドライバーを使って、ネジでサーボモーターを固定していきます。プラスチックパーツなので、ネジを締めすぎないように注意しましょう。 |
| 60 |

|
反対側もネジで締めましょう。 |
| 61 |

|
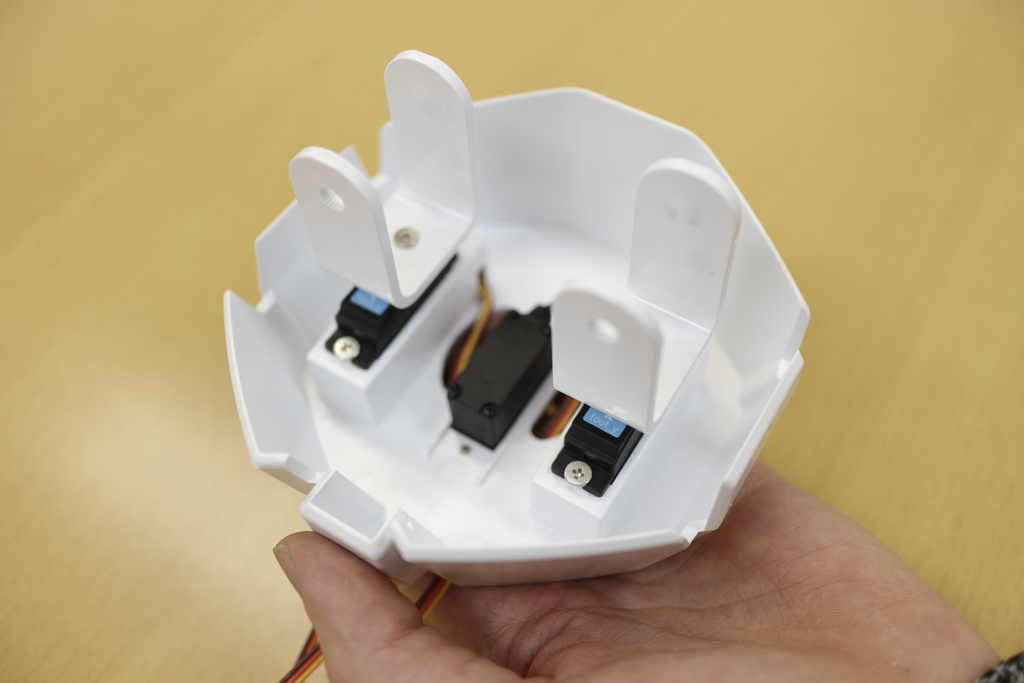
つぎに組み付けるのは「R foot_y」と「L foot_y」です |
| 62 |

|
「R foot_y」と「L foot_y」は裏から挿し込みます。ケーブルから先にとおしてください。 |
| 63 |

|
|
| 64 |

|
RとLを右側と左側で間違えていないか、サーボモーターの向きは正しいか、写真と見比べて確認しましょう |
| 65 |

|
銀色のネジ(タッピング3mm)で締めてサーボモーターを固定していきましょう。 |
| 66 |
|
ネジを閉め終えたら、裏返してみましょう。 |
| 67 |

|
ケーブルを写真の位置のスリットに通してください。 |
| 68 |

|
ケーブルをスリットに通すとこのようになります。 |
| 69 |

|
さらにスリットを通したケーブルを横の穴に通してください。 |
| 70 |
|
ケーブルを通し終わるとこのようになります。 |
| 71 |

|
つぎはU字型のパーツを取り出します。 |
| 72 |

|
写真のような向きになるように「R foot_y」と「L foot_y」に挿し込みます。サーボモーターの角度は初期値にあわせてあるので、軸を回してしまわないように気をつけてください。サーボモーターの初期値は個体差があるので、完全に並行にならないこともあります。最後にプログラムで調整できるのでだいたい平行になるように取り付けましょう。 |
| 73 |

|
銀色のネジ(タッピング3mm)を締めて固定します。 |
| 74 |
|
このようになります。 |
| 75 |

|
右足パーツを取りだします。左右に気をつけて取り付けていきましょう。 |
| 76 |

|
写真のようにU字型パーツを右足パーツに通していきます。 |
| 77 |

|
この状態だと、まだ固定はされませんが、このような配置になっていれば大丈夫です。 |
| 78 |

|
「R foot_p」と「L foot_p」を使って足パーツを固定していきます。 |
| 79 |

|
先にケーブルを腰パーツの穴に通しておきます。このとき右足パーツと腰パーツを貫通するようにケーブルを通してください。 |
| 80 |

|
先にケーブルを腰パーツの穴に通しておきます。 |
| 81 |
|
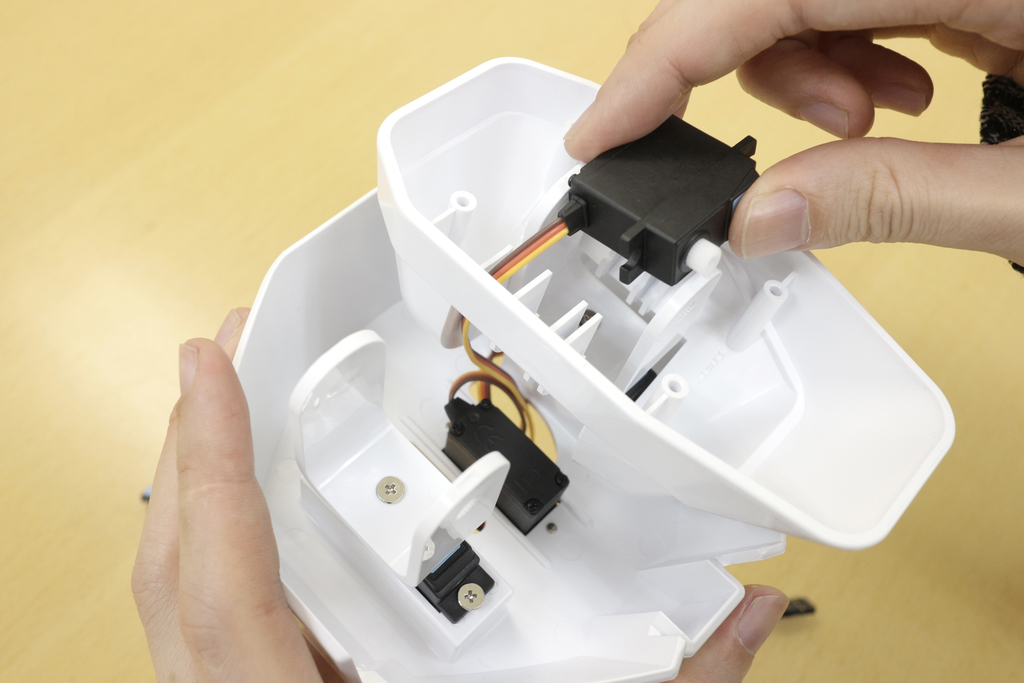
ケーブルを通したら、U字型パーツにサーボモーターをはめ込んでいきましょう。U字型パーツを広げて、サーボモーターが水平になるようにはめ込みます。 |
| 82 |

|
U字型パーツにサーボモーターをはめ込んだら、右足パーツのスリットに サーボモーターの耳を差し込んで位置をあわせましょう。 |
| 83 |

|
反対側も同じように、左足パーツを挿してから、腰パーツの穴までケーブルを通しましょう。 |
| 84 |

|
|
| 85 |

|
左右のサーボモーターをはめ込むとこんな感じです。サーボモーターが初期値の角度で、だいたい水平になるようにとりつけましょう。 |
| 86 |

|
足のサーボモーターの固定はキットに2つだけ入っている大頭ネジ3mmを使います |
| 87 |

|
このように頭の大きなネジです。 |
| 88 |
|
サーボモーターの軸の穴をネジで締めます。 |
| 89 |

|
このようになります。固定できました。 |
| 90 |

|
それでは足裏パーツでフタをしましょう。左右を確認して右足から取り付けていきます |
| 91 |

|
銀色のネジ(タッピング3mm)を4ヶ所に締めてください。 |
| 92 |

|
このようになります。 |
| 93 |

|
反対側の足裏パーツも取り付けましょう。 |
| 94 |

|
左足も4ヶ所、ネジで締めます。 |
| 95 |

|
これで下半身の完成です! |
| 96 |
|
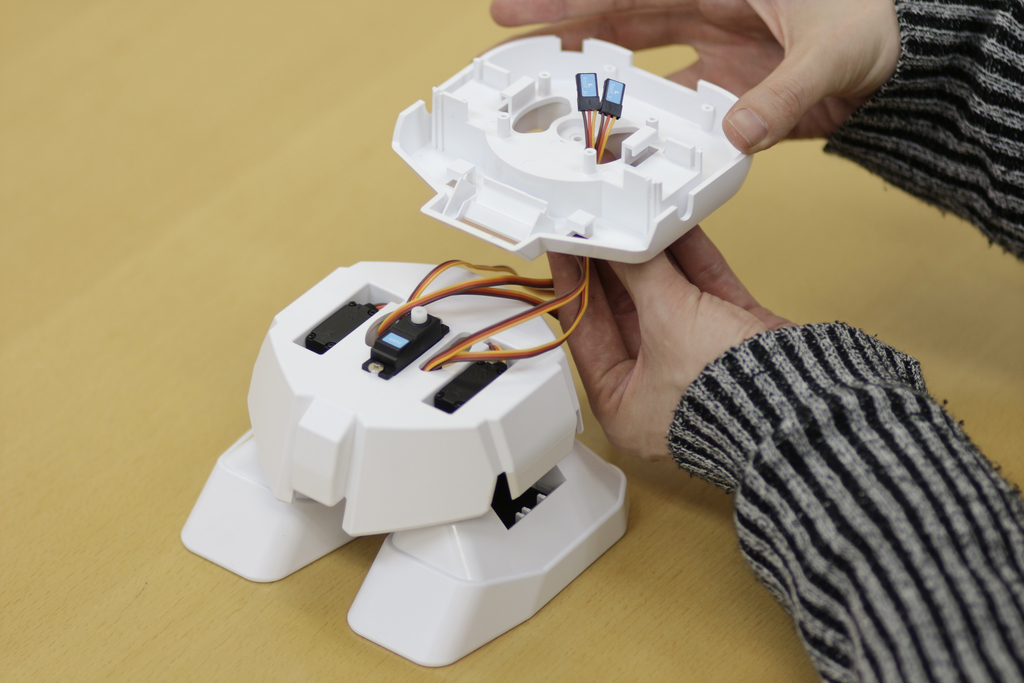
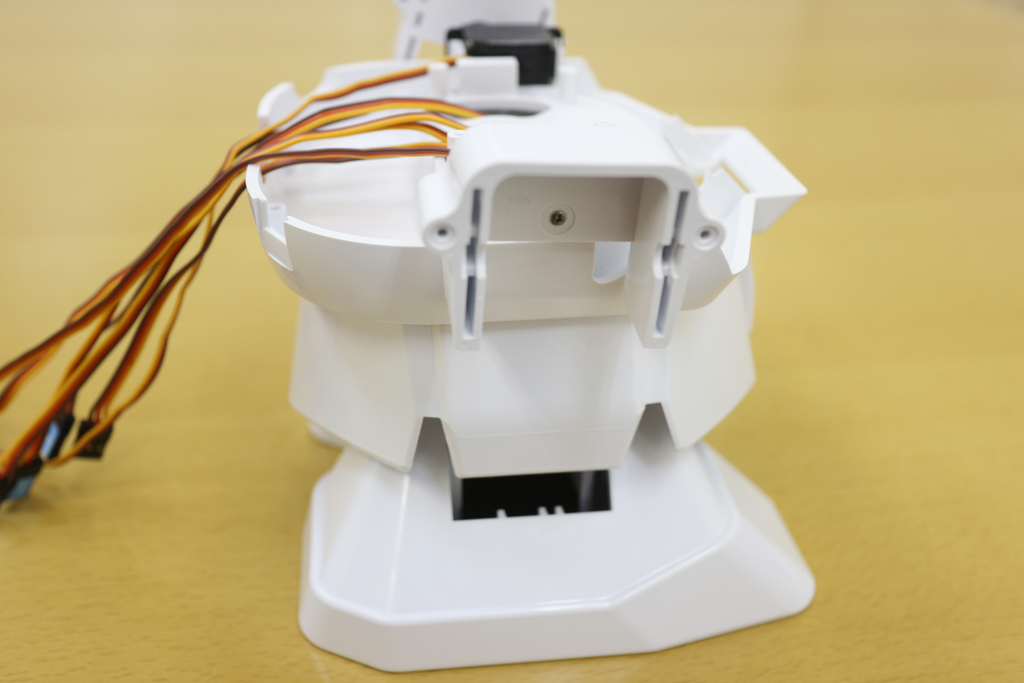
上半身の組み立てに入ります。腰パーツから出ているケーブルを胸パーツの穴に通していきます。 |
| 97 |

|
5本のケーブルを写真のように胸パーツの穴に通します。 |
| 98 |
|
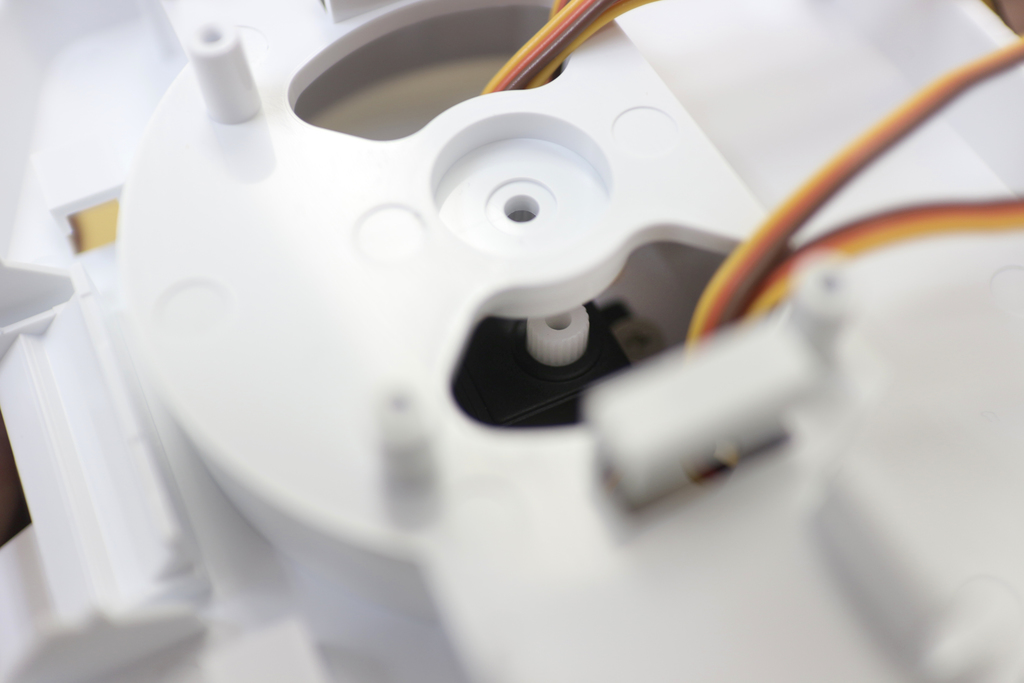
胸パーツの真ん中の穴に「waist」のサーボモーターの軸をはめ込みます。胸パーツの向きがまっすぐ正面になる向きにはめ込んでください。 |
| 99 |

|
銀色のネジ(タッピング3mm)で締めて固定します。 |
| 100 |

|
このようになります。 |
| 101 |

|
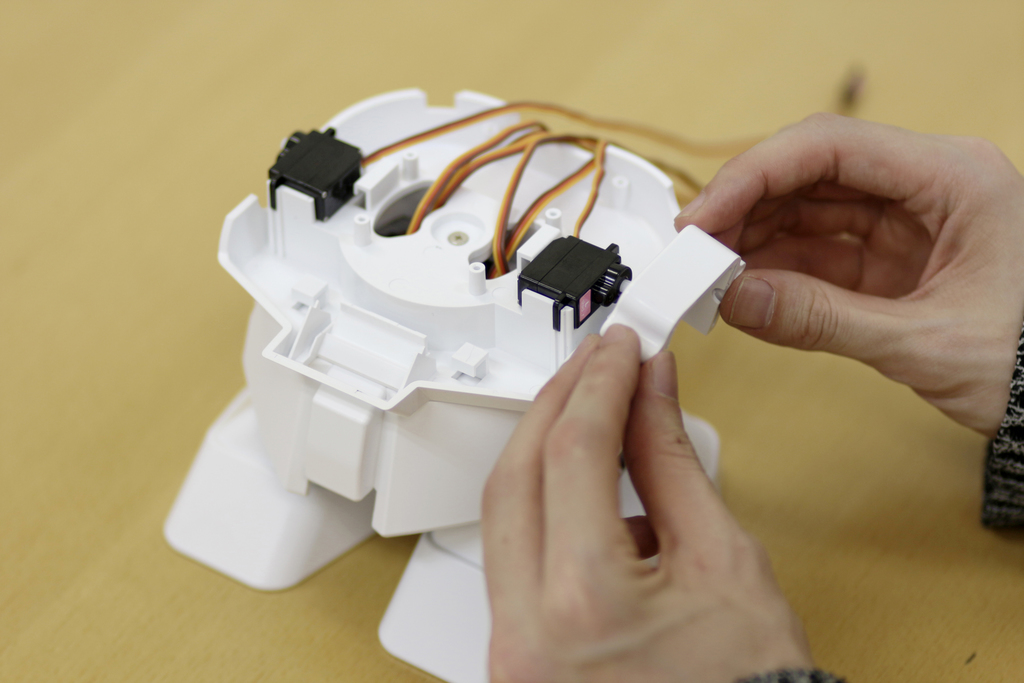
腕には小さいほうのサーボモーターを使います。「R shld_r」と「L shld_r」から取り付けていきます。 |
| 102 |

|
「R shld_r」と「L shld_r」を胸パーツにはめ込みます。写真を見てサーボモーターの向きと左右に気をつけてください。「R shld_r」が右側、「L shld_r」が左側です。胸パーツの切欠きの真上にピンクのシールがくる向きが正しい向きです。 |
| 103 |

|
肩パーツを取り出します。 |
| 104 |
|
「R shld_r」と「L shld_r」の軸に肩パーツをはめ込みます。写真のように肩パーツが水平になる向きにはめ込んでください。 |
| 105 |

|
サーボモータの初期位置の個体差によって、肩パーツを完全に水平にはめ込むことができない場合があります。 その場合はだいたい水平になる向きではめ込みます。どちらかに傾いてしまう場合は、どちらかといえば写真のように後ろ手になる側に傾く角度ではめ込むようにしておくと、あとでプログラムによって調整ができます。 |
| 106 |

|
キットに4本入っている銀色の細いネジ(タッピング2-5mm)で固定します。 |
| 107 |

|
銀色の細いネジ(タッピング2-5mm)で締めて、肩パーツを「L shld_r」に固定します。 |
| 108 |

|
銀色の細いネジ(タッピング2-5mm)で締めて、肩パーツを「L shld_r」に固定します。 |
| 109 |
|
反対側も同じように「R shld_r」に肩パーツを取り付けます。こちら側はほぼ水平にはめ込むことができました。 |
| 110 |

|
小さいほうのサーボモータ4個と腕パーツを取り出します。 |
| 111 |

|
「R shld_p」、「L shld_p」、「R hand」、「L hand」 |
| 112 |

|
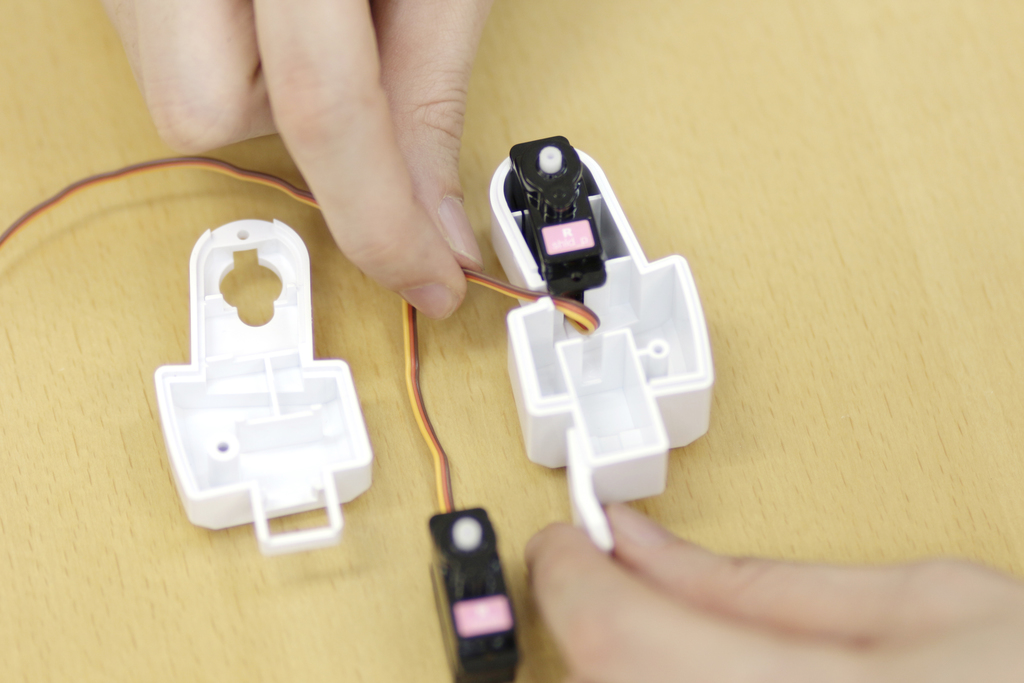
右腕パーツから組み立ていきます。「R shld_p」のケーブルを背面に沿わせるようにして持ちます。 |
| 113 |

|
そのまま右腕パーツの肩の側に「R shld_pを挿し込んでいきます。 |
| 114 |
|
「R shld_p」を挿し込んだあと、ケーブルを横の溝から外側へ取り回します。 |
| 115 |

|
つぎに「R hand」のケーブルも背面に沿わせるようにして持ちます。 |
| 116 |

|
そのまま腕の先端の側に「R hand」を挿し込みます。 |
| 117 |

|
先ほどと同じようにケーブルを横の溝から外側へ取り回します。 |
| 118 |

|
左腕パーツも同じようにサーボモーターを挿し込みます |
| 119 |
|
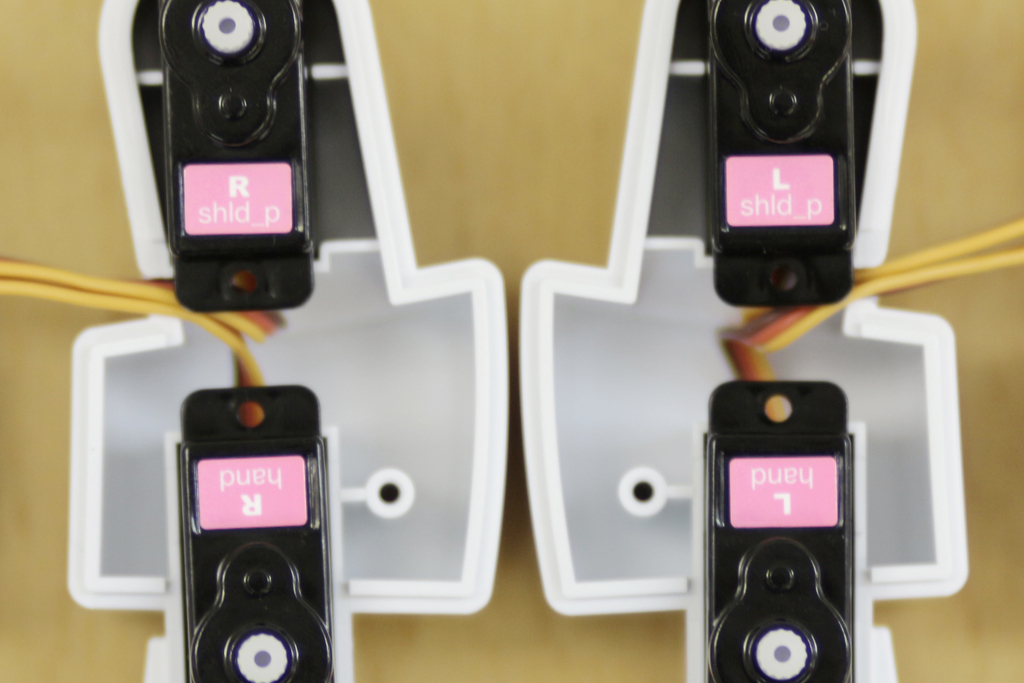
写真を見て各サーボモータの位置と向きを確認しましょう。 |
| 120 |

|
腕パーツのカバーをはめ込みます。 |
| 121 |

|
腕パーツの固定には黒色の細いネジ(タッピング2-7mm)を使います。 |
| 122 |
|
腕パーツの穴に黒色の細いネジ(タッピング2-7mm)を挿し込みます。 |
| 123 |

|
ネジを締めます。ネジを締めすぎないように注意しましょう。 |
| 124 |

|
肩のほうの穴も黒色の細いネジ(タッピング2-7mm)で締めます。 |
| 125 |

|
こちらも締めすぎないように注意しましょう。 |
| 126 |

|
このようになります。左右の腕2ヶ所ずつ合計4本のネジで締めましたね。 |
| 127 |

|
サーボモーターの袋に入っていた、ケーブルと十字のパーツが入った袋を取り出しましょう。 |
| 128 |
|
十字パーツから使っていきます。 |
| 129 |

|
先ほど組立てた腕パーツに十字パーツをはめ込みます。 |
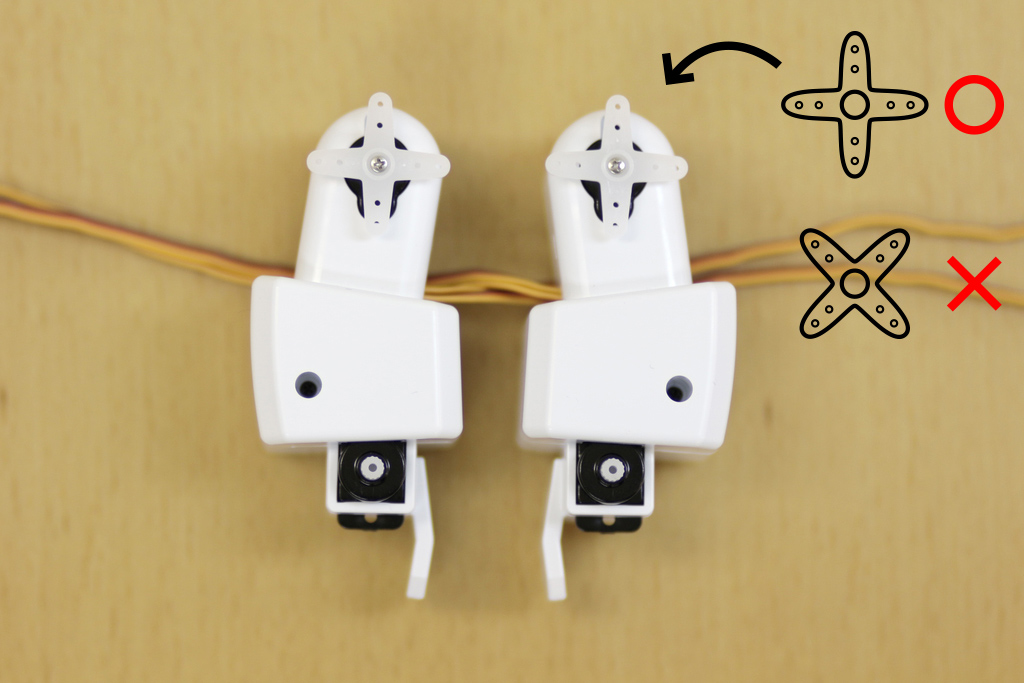
| 130 |

|
写真を見て左右ともサーボモーターの軸は回転させないように気をつけながら、十字パーツの向きを合わせてはめ込みましょう。傾いてしまう場合は一度抜いてから90度違う向きではめ込んでみてください。4方向のうちどこかは正しくはめ込める向きがあります |
| 131 |

|
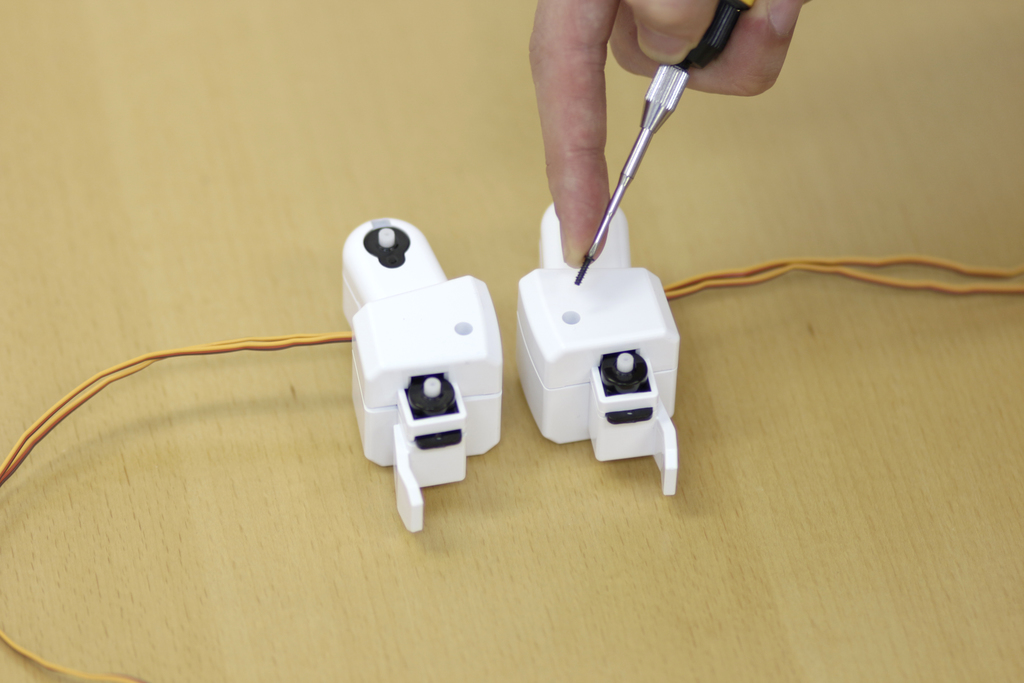
正しい向きにはめ込めたら、銀色の細いネジ(タッピング2-5mm)で締めて固定します。 |
| 132 |
|
このようになります。 |
| 133 |
|
指パーツを取り出しましょう。 |
| 134 |

|
指パーツをサーボモーターの軸とその反対の突起にはめ込みます。指パーツの円周がギザギザになっている穴がサーボモーターの軸側です。 |
| 135 |

|
モータの軸がギザギザにかみ合うようにはめ込みます。写真くらいに手がひらいた角度はめ込んでください。 |
| 136 |

|
手のひらの角度に気をつけてください。開き過ぎず閉じ過ぎない中間あたりを初期角度にしましょう。 |
| 137 |

|
組立てた腕パーツを肩パーツに取り付けていきます。十字パーツが背中側に、指パーツが外側になる向きにしてください。 |
| 138 |

|
十字パーツを肩パーツの溝に挿し込みましょう |
| 139 |

|
肩パーツの先端を取り出します。 |
| 140 |
|
肩パーツと十字パーツにあわせます。 |
| 141 |

|
黒色の細いネジ(タッピング2-7mm)で締めて固定します。 |
| 142 |

|
ネジは左右それぞれ2ヶ所を締めます。 |
| 143 |

|
腕のサーボモーターの2本のケーブルは胸パーツの切欠きから内側に通しましょう。 |
| 144 |

|
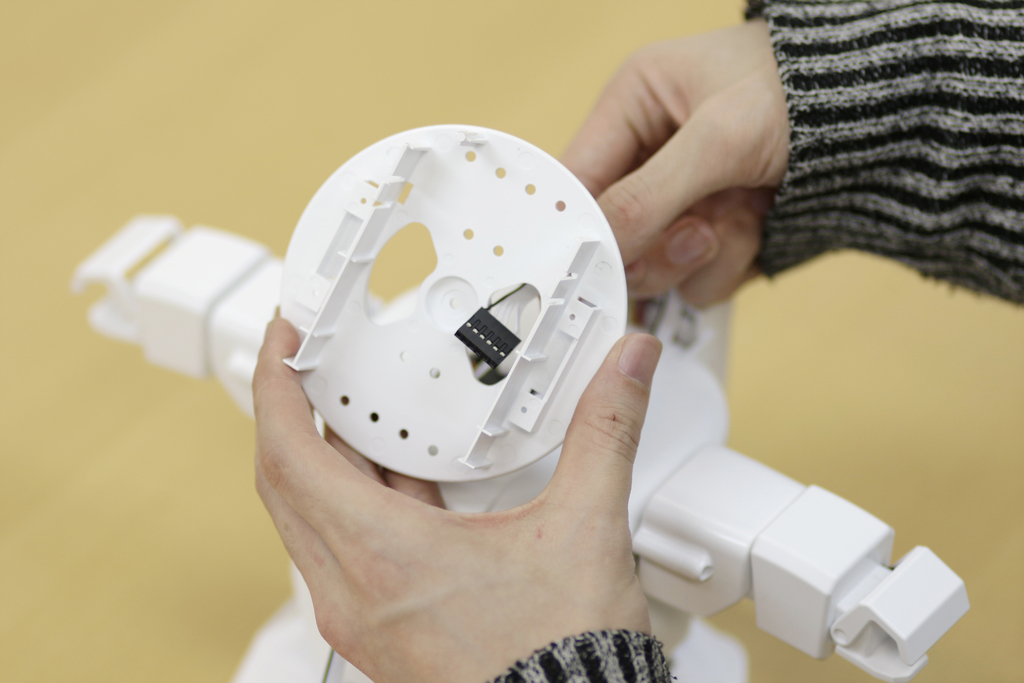
Rapiroメイン基板を取り付けましょう。 |
| 145 |

|
胸パーツの背中のところに基板をのせます。 |
| 146 |

|
基板上の4ヶ所の穴を黒色の細いネジ(タッピング2-7mm)で締めていきます。 |
| 147 |
|
|
| 148 |

|
|
| 149 |

|
組立てたサーボモーターを基板に接続していきましょう。 |
| 150 |

|
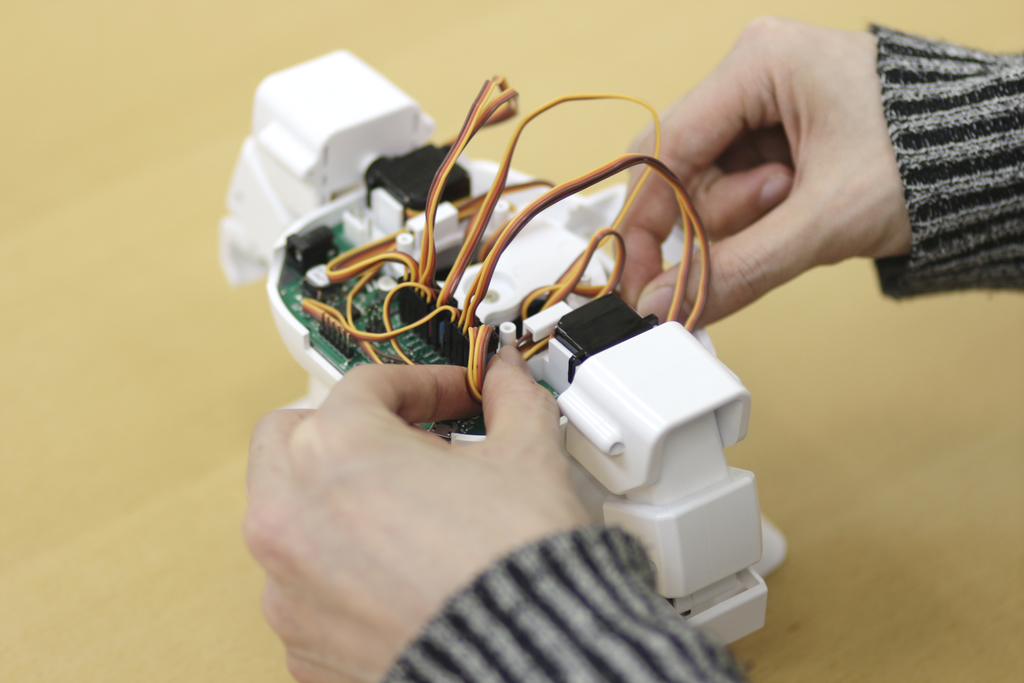
基板上に書かれた端子名とコネクターに貼ったシールの対応を確認しながら挿し込んでいきます。(黄色い線が基板の内側、茶色い線が基板の外側になるように挿し込みます。) |
| 151 |

|
head以外の11本のケーブルのコネクターが端子に接続されました。 |
| 152 |
|
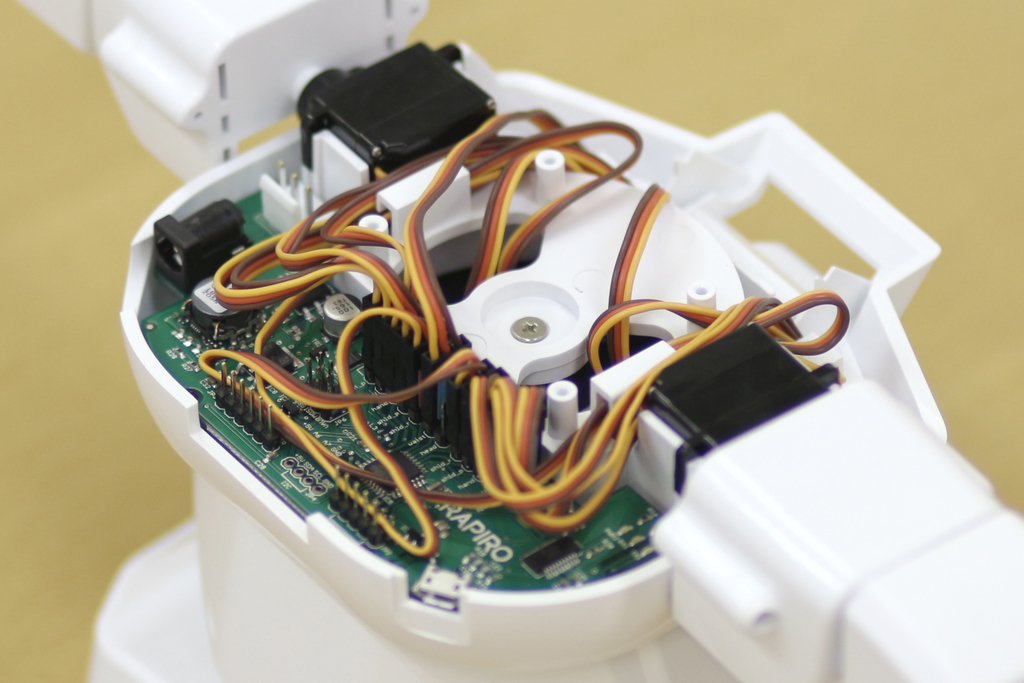
ケーブルにクセをつけてまとめておきましょう。 |
| 153 |

|
胸パーツのカバーが閉められるようにケーブルをまとめます。胸パーツにはケーブルをまとめるためのフック状の突起があります。 |
| 154 |
|
|
| 155 |

|
6極のケーブルと5極のケーブルを取り出します。 |
| 156 |

|
写真のように6極ケーブルと5極ケーブルを基板に挿し込みます。ケーブルの目印の黒い線が背中から見て右側になるように挿してください。 |
| 157 |

|
最後に残ったサーボモーター「head」を取り付けます。 |
| 158 |

|
最後に残ったサーボモーター「head」を取り付けます。 |
| 159 |

|
胸パーツのカバーの中心の四角い穴にケーブルから通していきます。 |
| 160 |

|
サーボモーター「head」をはめ込みます。シールの側が前方にくるよう向きに気をつけてください。 |
| 161 |

|
銀色の太いネジ(タッピング3mm)で締めていきます。 |
| 162 |

|
ネジは締めすぎないように気をつけましょう。 |
| 163 |

|
両側を固定できました。 |
| 164 |

|
「head」のコネクタを基板に挿し込みます。 |
| 165 |

|
5極ケーブルを胸パーツのカバーの右側の穴に通します。 |
| 166 |

|
5極ケーブルを胸パーツのカバーの右側の穴に通します。 |
| 167 |

|
6極ケーブルは左側の穴に通します。 |
| 168 |
|
胸パーツのカバーを閉じるときに、挟んでしまわないように「head」のケーブルもクセをつけて取り回しておきます。 |
| 169 |

|
胸パーツのカバーを閉める前に電池ボックスを接続しておきましょう。 |
| 170 |

|
6極ケーブルと5極ケーブルの間を通してください。 |
| 171 |

|
Rapiroメイン基板に電池ボックスのコネクタを接続します。 |
| 172 |

|
そのまま電池ボックスを胸パーツのカバーのスリットに引っ掛けます。 |
| 173 |

|
外れないように銀色の太いネジ(タッピング3mm)で締めます。深くねじ込まず、外れない程度に写真と同じくらいまで締めるだけにしてください。 |
| 174 |

|
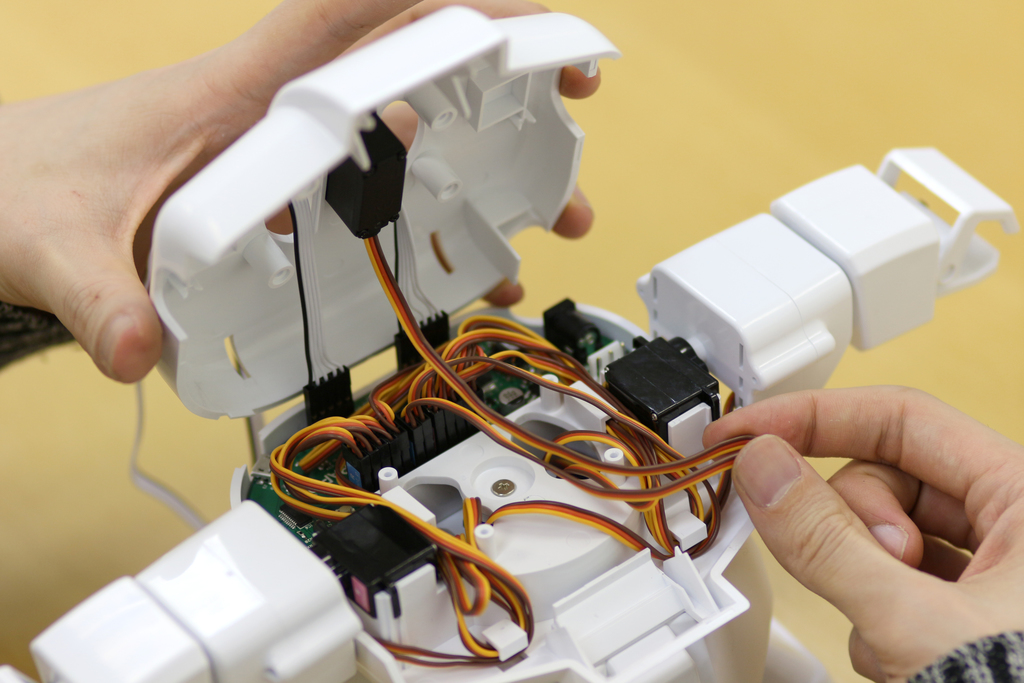
胸パーツのカバーを閉じます。このとき腕からのケーブルにたるみがあることを確認してください。 |
| 175 |

|
腕をいっぱいまで広げて動かすために充分なケーブルのたるみを持たせてください。 |
| 176 |

|
胸パーツのカバーの4ヶ所の穴を黒色の細いネジ(タッピング2-7mm)で締めていきます。 |
| 177 |

|
ネジで締めても写真のように胸パーツの合わせ面に隙間が空いてしまう場合は、胸パーツの中のどこかでケーブルを挟んでしまっています。一度開いて中のケーブルの取り回しを直してください。 |
| 178 |

|
ケーブルが挟まっていなければ、4箇所のネジを締めるとピッタリと隙間なく合わさります。 |
| 179 |
|
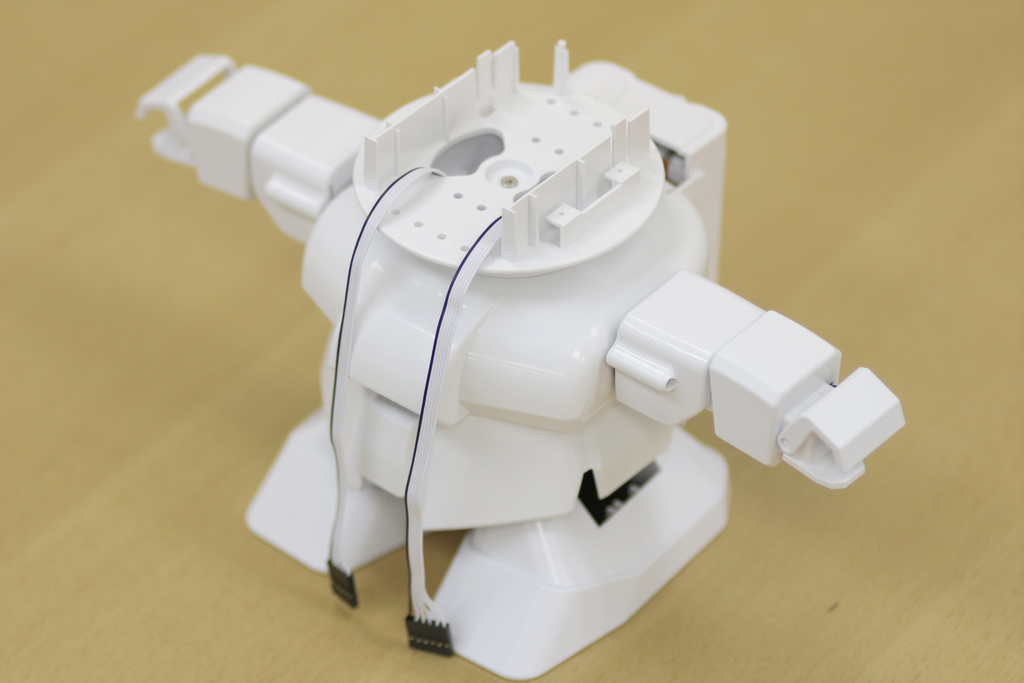
首パーツに6極ケーブルと5極ケーブルを通していきます。 |
| 180 |

|
首パーツは支柱が立っているほうが背中側になるように取り付けます。 |
| 181 |

|
向きをまっすぐにして、「head」の軸にはめ込みます。 |
| 182 |

|
銀色の太いネジ(タッピング3mm)で締めて軸に固定しましょう。 |
| 183 |
|
このようになります。 |
| 184 |

|
いよいよ頭のパーツです。 |
| 185 |

|
後頭部のパーツに耳のパーツを挿し込みます。 |
| 186 |

|
カチッとはまるまで挿し込んでください。 |
| 187 |

|
両側を挿し込みました。 |
| 188 |

|
後頭部パーツの内側にはRapiroLED基板をネジ止めします。銀色の太いネジ(タッピング3mm)を使います。 |
| 189 |

|
ネジは締めすぎないように気をつけましょう。 |
| 190 |

|
顔のパーツに目のパーツをはめ込みます。 |
| 191 |

|
眉間の内側を銀色の太いネジ(タッピング3mm)でネジ止めします。ここもネジの締めすぎには気をつけましょう。 |
| 192 |
|
眉間の内側を銀色の太いネジ(タッピング3mm)でネジ止めします。ここもネジの締めすぎには気をつけましょう。 |
| 193 |

|
額のパーツも取り付けます。 |
| 194 |

|
両端を黒色の細いネジ(タッピング2-7mm)で締めましょう。 |
| 195 |

|
これで顔パーツも完成です。 |
| 196 |

|
胴体から出ている5極ケーブルはRapiroLED基板に接続します。5極ケーブルの黒い配線が下になるように挿し込みましょう。 |
| 197 |

|
後頭部パーツを後ろから、首パーツに挿し込みます。6極ケーブルはRaspberry Piやその他シリアルUARTと接続する際に使用するので、ひとまず折りたたんでおいてください。 |
| 198 |

|
前側から顔パーツも挿し込みます。 |
| 199 |

|
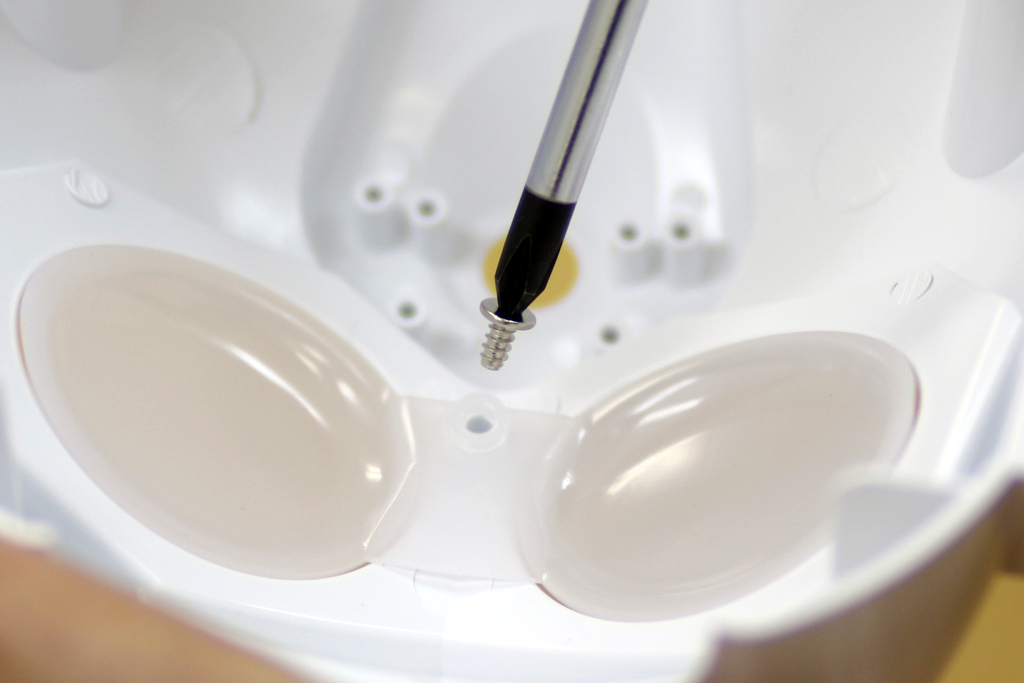
頭の固定には2つだけ入っているM3の皿ネジをつかいます。 |
| 200 |

|
後頭部側から皿ネジを挿し込んで締めていきます。 |
| 201 |

|
|
| 202 |

|
両側の穴をネジで閉めたら、ひとまず組み立ちました。 |
| 203 |

|
前を向けると、、。 |
| 204 |

|
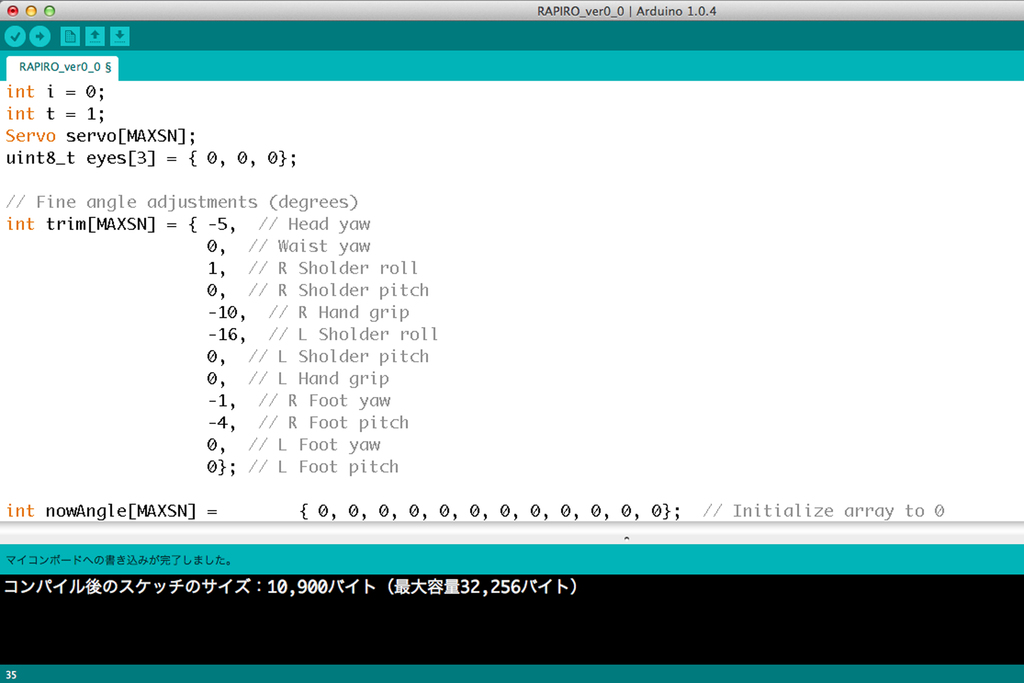
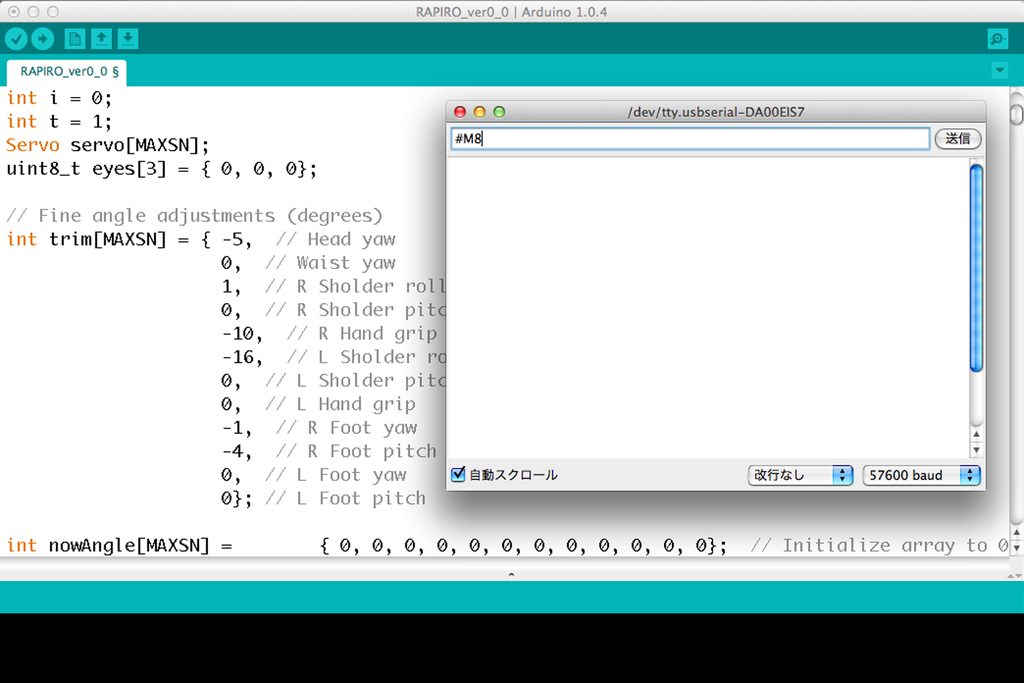
仕上げにパソコンと接続してサーボモーターの個体差による角度誤差を修正しましょう。 注:電源を入れて立たせたときに、サーボモーターから大きなノイズが発生する場合は、足の初期角度がまっすぐになっていない可能性が高いです。初期角度を次の手順で微調整して、足裏を水平にすることで、ノイズは鳴らなくなります。足裏が水平でない状態で使用を続けると、サーボモーターに無理な力がかかるので、サーボモーターの寿命が短くなります。特に足裏の角度は、できるだけ丁寧に微調整しましょう。 下記のソフトウェアをインストールしてください。 Arduino IDE FTDIドライバ(インストール方法) インストールしたらRapiroメイン基板用標準ファームウエア(Arduinoのスケッチ)をダウンロードしてArduino IDEで開いてください。 Rapiroメイン基板用標準ファームウエア(Arduinoのスケッチ) |
| 205 |

|
パソコンとRapiroをMicro-USBケーブルで接続すると目が光りますが、スイッチを入れなければサーボモーターには通電しません。 |
| 206 |

|
スイッチを入れたときに足や手がちょっと傾いてしまう場合には |
| 207 |

|
int trim[MAXSN]の配列に角度の補正値を入力します。 |
| 208 |
|
傾いているサーボモーターの補正値を変更してRapiroメイン基板用標準ファームウエア(Arduinoのスケッチ)をRapiroメイン基板(Arduino Uno互換)にアップロードしましょう。Arduino IDEのメニューからツール > マイコンボード > Arduino Uno を選択してからアップロードしてください。 |
| 209 |

|
各サーボモーターの向きがまっすぐになるようにint trim[MAXSN]の配列の変更と、そのスケッチのアップロードを繰り返して姿勢を整えます。 |
| 210 |
|
姿勢が整ったら、Arduino IDEのシリアルターミナルを開いて#M1~#M9の番号を送信してみましょう。Rapiroが(#M0は停止コマンド)番号に割り当てられた動きを行います。 参考:シリアルコマンドの送り方と一覧表 |
| 211 |

|
Raspberry Piや無線モジュールを組み込めばMicro-USBケーブルを接続しなくてもRapiroが動くようになります。いろいろな改造に挑戦してみてください。 |
| 212 |

|
組み立て終わったRapiroはもとの箱にも入るようになっています。 |
| 213 |

|
保管や移動にお使いください。 |